



All visitors to the forum "dPIPE Software" can find here answers to frequently asked questions about using dPIPE.
General questions (input data, calculation parameters)
#- 1. What does the term “reference temperature” mean in the software, and how is it utilized? [show]
- Reference temperature T_REF is the temperature used to assign thermal expansion coefficient (data for various materials). The software also uses T_REF to determine the value of the reference elasticity modulus, when calculating fatigue strength and adjusting internal forces to the “cold” elasticity modulus. As a rule, the User does not need to modify this parameter.
- 2. How is the TA parameter (installation temperature) utilized in the dPIPE software? [show]
- Installation temperature or ambient temperature (TA) allows to determine the “base” temperature, which is used to calculate piping thermal expansions. It means, for each of the operating modes the heating temperature is calculated as ΔT=Top.-TA. It is implied that, at the installation temperature, stresses due to thermal expansions are non-existent. If the User uses a predefined specification for analysis, it is accepted that the cold state temperature (MOD = ‘$COLD’) equals the installation temperature, and there are no forces induced by thermal expansions. In case the installation temperature varies for different piping sections, one needs to use the '$INST' mode (OPVAL command) to assign different temperature for each load group.
- 3. How can several independent piping branches be included into one calculation model? [show]
-
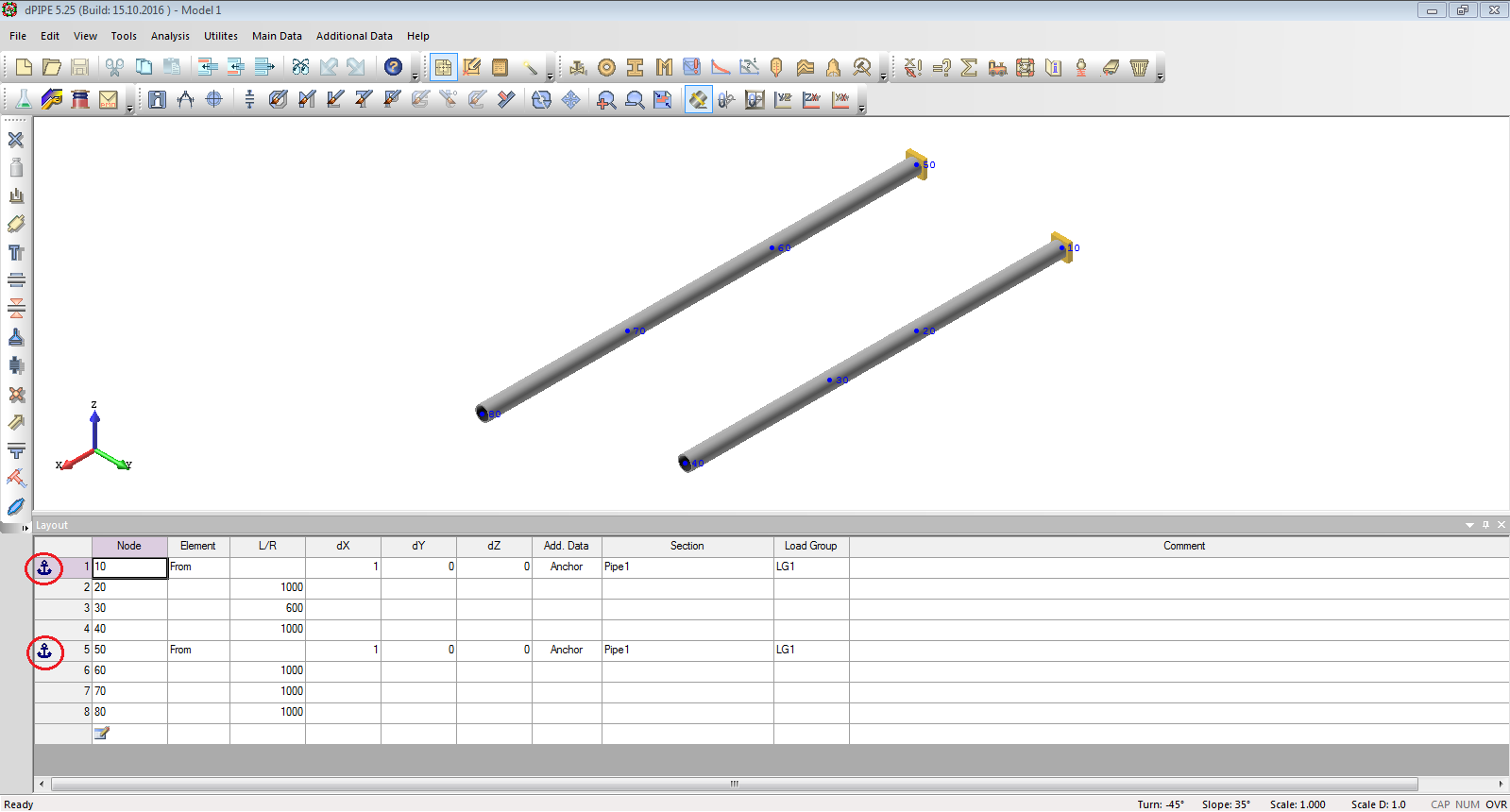
To include several separate piping branches, use the POS command, determining node coordinates (see Help for the description of this command):
- 4. How to introduce in the calculation model a branch pipe? [show]
-
In case of branching, specify the node, which will be the starting point of branching, in a new line of the table. Then use the same row to set command FROM and indicate a new direction.
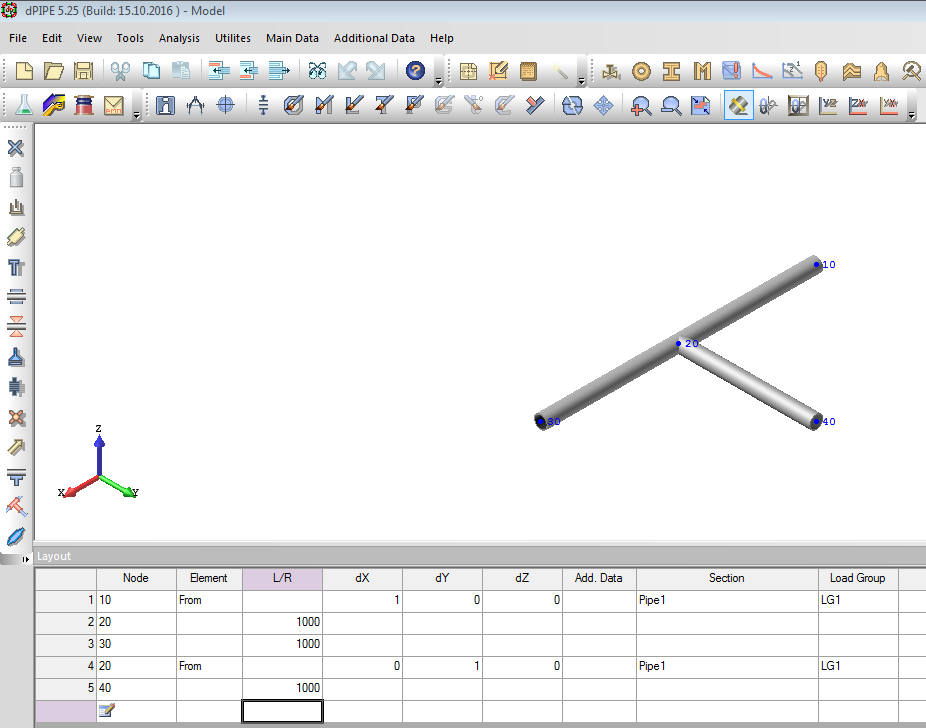
A tee can be set only at the point of branching. The number of adjacent elements should be equal to 3, and the branch pipe should be perpendicular to the run pipe. If the TEE command is not used, the stresses will be estimated only for pipes joined in the node.
- 5. Unit system. Is it possible to change units for support’s reactions from “kN” to “Newton” in the output summary tables? [show]
-
dPIPE utilizes a consistent unit system. Newton and millimeter (and units derived from them) are used by default:
- displacements, dimensions, thicknesses, etc.: millimeters;
- accelerations: in acceleration due to gravity, g
- forces – Newtons;
- rotation angles: radians or degrees (as specified in the manual);
- pressure, stresses: N/mm2 or MPa.
Nevertheless, if necessary it is possible to modify the output values in support’s spreadsheets: either keep the output values as default ones, kN (kN*m), or change them to N (N*m). In order to do that:
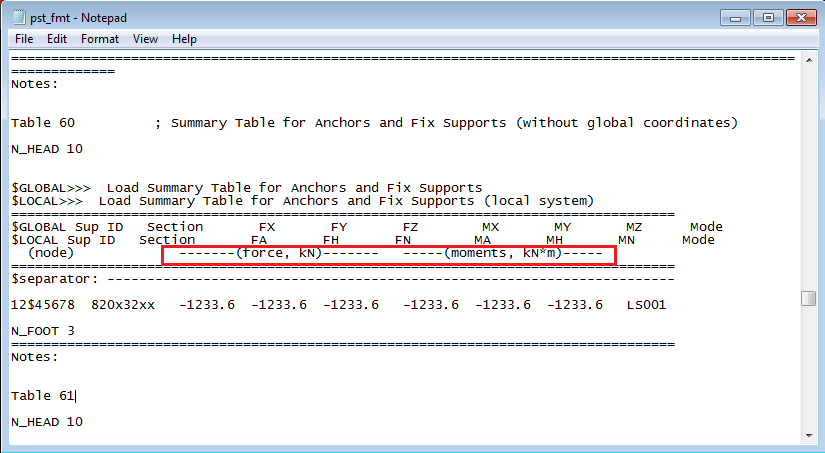
1. open file “…\dPIPE 5.XX\en-US\pst_fmt.dbs" (where XX is the number of the current version of the program) in a text editor;
2. find the required table “Table NN” using the search option (NN is the table number: tables 59-60 is the output of loads on anchors; tables 61-60 is the output of loads on sliding supports, guide and restraints);
3. Change kN to N in the following line:
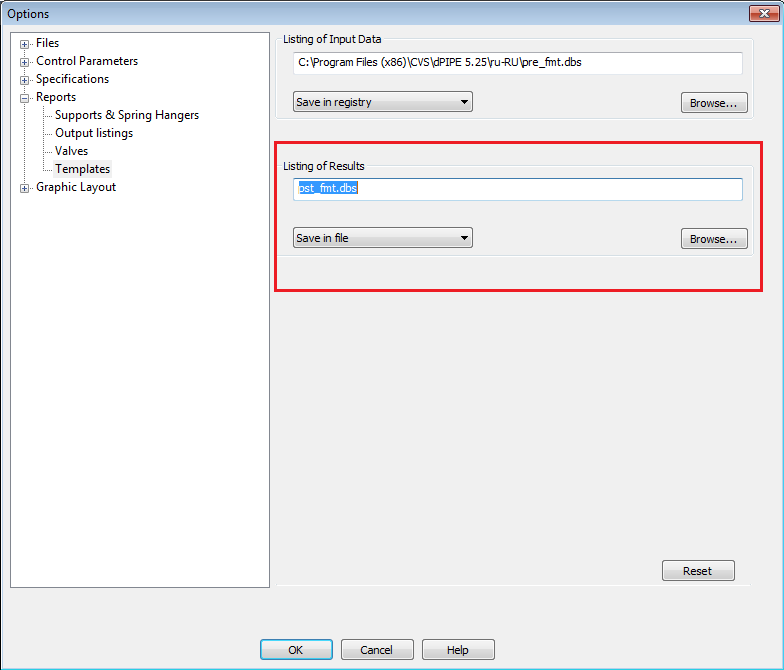
It is recommended to save the changed file “pst_fmt.dbs” into a separate user’s folder instead of saving it as the existing file and specify the path to it in the dialogue Templates (also see command DBS):
Piping elements: bends, valves, welded connections, tees
#- 1. Should I set the middle point of bend in order to check its strength? [show]
- It is not necessary – the program does it automatically.
- 2. How do I assign the piping valves? The data includes weight of the air-driven valve – 600 kg, length/height – 800/1800 mm, the actuator is placed at a 30 degree angle to the vertical axis. There is no data on the actuator’s weight or centers of mass. [show]
-
To simulate a valve, dPIPE uses a specialized element “Valve”:
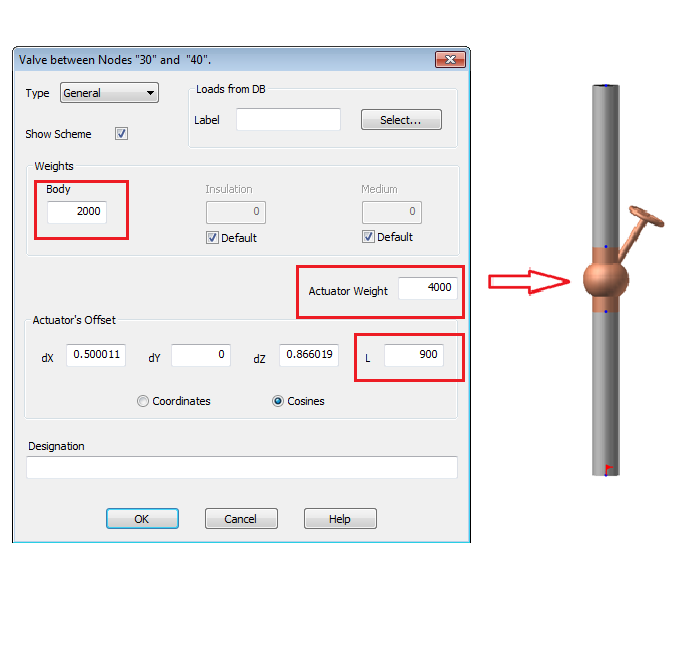
When the data is lacking, distribution of weight between the valve body and actuator is the engineer’s responsibility. From the standpoint of weight and inertia loads, the most conservative option is to model the valve weight with the maximal COG offset (at the end of the actuator). Another extreme case is to prescribe all the weight to the valve body. Of course, the correct answer is somewhere in the middle, however only relevant drawings or manufacturer’s data could bring a right answer… Nevertheless, we should always remember that analysis results are as accurate as input data…
- 3. Which element is to be used for modeling a hinge connection between two pipes or a pipe and a construction element? [show]
-
It is easy to model a hinge by using “Flexible Joint” (FJ) with zero bending and torsional stiffness.
10:P ... ; hinge in node 10
20:FJ KB=0, KT=0 ; node 20 coincides with node 10 and is rigidly bound to it only in respect to displacements. Angular stiffness equals 0.
30:P ...
See Help for further details on FJ.
- 4. To use command BEAM, one needs to enter certain input data, including the name of cross-section, its parameters, weight and section’s angle. How does one determine shear coefficients Sy and Sz for a beam with an arbitrary cross-section? What are the value ranges for standard cross-sections (u-beam, I-beam, box-section)? [show]
-
dPIPE uses the so-called “shear or shape factors” (Sy and Sz) to account beam’s shear deformation. For further details on calculating these coefficients, see the book Gere and Timoshenko, Mechanics of Materials, Brooks/Cole Engineering Division, Monterey, California, 1984. Extract from the corresponding chapter may be seen here:
www.dpipe.ru/.../Shear_Factor.pdf
- 5. How the welds are considered in dPIPE? [show]
-
It depends on the chosen Norms.
1. Within PNAE Code (CODE = 'PNAE_T') the following approach is implemented: all stress groups ( (σ)2, (σ)RK, (σaF)k) include circumferential stresses due to internal pressure where reduction coefficients for the longitudinal welds is included:
For the fatigue analysis the fatigue strength reduction factor φs is taken into account. It depends on the type and quality of the welding: calculated stresses (σaF)k are divided by this coefficient
2. PNAE Code for the piping working at elevated temperature (CODE = 'PNAE_T'): procedure is the same as above, except that for (σ)2 stresses the reduction coefficient φw for the circumferential welds is taken into account:
φw is determined according to p. 4.3.3 of the Code.
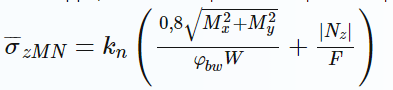
3. RD 10-249-98 Strength Design Code for Stationary Boilers and Steam and Hot Water Lines (CODE = ‘RD’):
All stages of analyses consider stress reduction factors for both types of welds: longitudinal (φw) and circumferential (φbw):
Assigning the welding coefficients can be performed in two ways: coefficients FW1 and FW2 in table “Pipe cross-sections” and command WLD in “Additional data”. Coefficient FW1 determines the strength reduction coefficient of a longitudinal (spiral) welded seam, while coefficient FW1 that of a circumferential weld. Command WLD sets the strength coefficient of a circumferential weld at a certain point. Apart from that, when performing analysis according to Codes RD, ASME B31.1 and PNAE_T, the “Control parameters” has a tab “Code” with an option “Check all points in regard to the coefficient of a circumferential weld” (parameter WLD_CHK, command CTRL). The option is switched on by default. This check is run for all the model nodes, as well as central points of straight sections. For bend central points the coefficient of a circumferential weld is assumed to be = 1, given that it is physically impossible for a welded seam to be there. If the option is switched off, the check will be run only at the points, where welded seams are set by command WLD.
- 6. Standard tees. How to select “TYPE” for standard tees. Which type should be chosen to model a welded tee, a forged tee with extruded outlet? How do the tee types in the software correlate to the tee types provided by the Russian codes? [show]
-
Standard tee types (WLT, BRC, UFT, etc.) are used to calculate flexibility and stress intensification coefficients in accordance with Western Codes. In the Russian Norms (CODE=’PNAE’, ‘PNAE_HT’, ‘RD’), tee formulae do not depend on the tee type. Therefore, the tee name can be arbitrary, with the two following exceptions:
1. Calculation is performed according to PNAE or RD, additionally taking into account flexibility of tee connections by the PRG method (TEE_FLEX=’PRG’). In this case, the following tee types can be used:
- BRC – branch connections;
- UFT – unreinforced welded tee;
- RFT – reinforced welded tee.
2. Calculation is performed according to RD, while the stresses in tee connections are estimated according to the recommended engineering methodology (TEE_RD=’CKTI’). In this case, the following tee types can be used:
- BRC – branch connections;
- UFT – unreinforced welded tee;
- RFT – reinforced welded tee;
- EXT - tee with extruded outlet;
- WLT – forged tee (rc > 0,1r).
More details on how to set a tee type can be found in the following sections of Help:
- Control parameters (CTRL) -> parameters TEE_FLEX and TEE_RD;
- Pipe cross-section characteristics (PIPE) -> subcommand TEE;
- Command TEE;
- Appendices XIII and XIV.
As an example, below you can find the tee types that are used in our pipe database according to Russian standards (OST):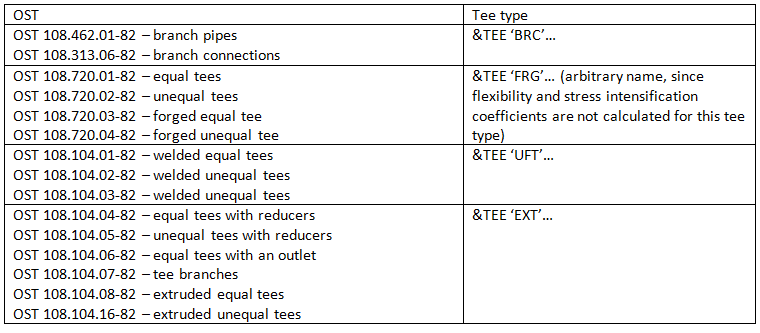
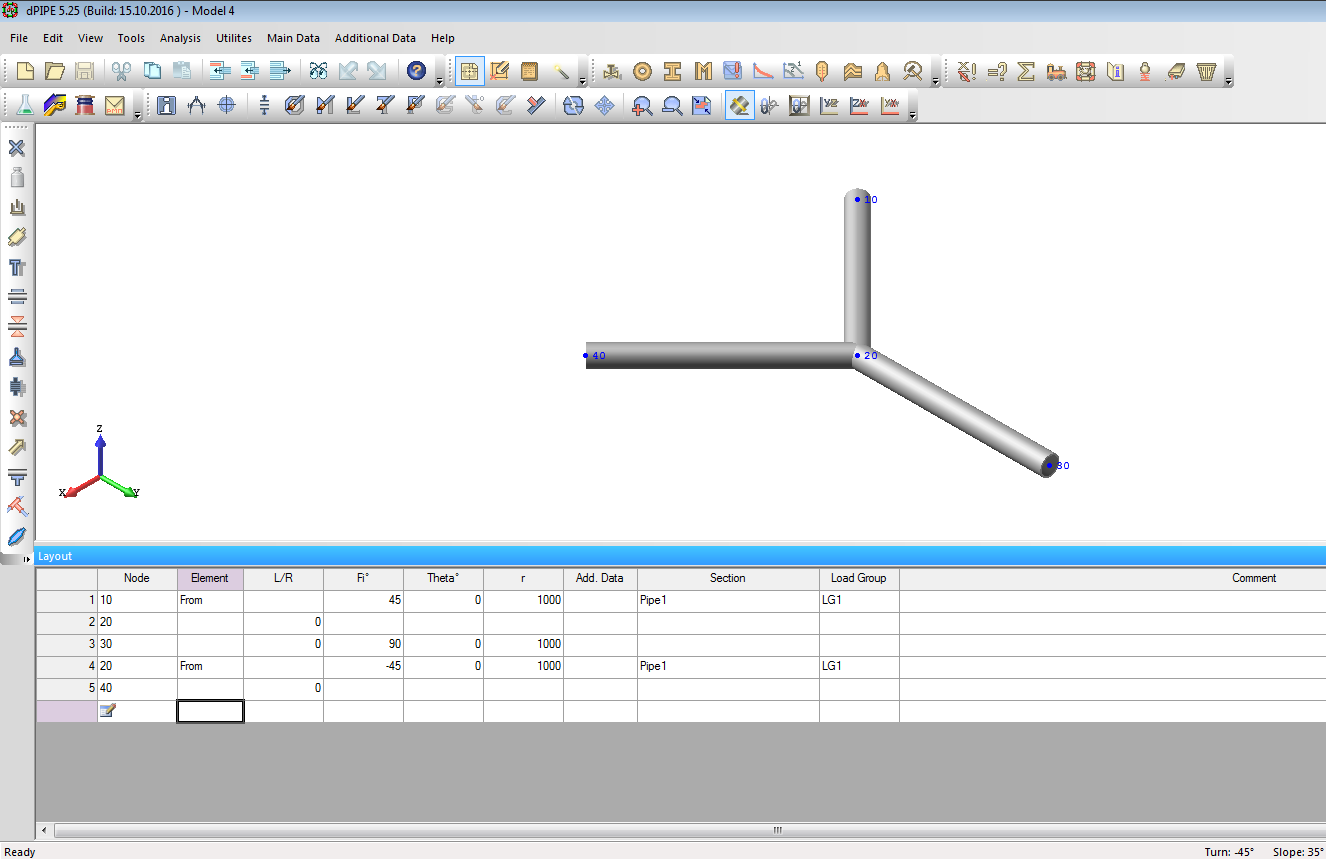
- 7. How can one set a tee with two branches inclined on 45 deg? [show]
-
It seems the so-called Y-shaped tee is meant in this question. Neither in the case of a Y-shaped tee, nor in the case of a tee with a nonorthogonal branch pipe, are there any formulae in the Russian codes (PNAE, RD). Nevertheless, the software provides for an opportunity to estimate such a construction, “turning a blind eye” to the nonorthogonal character of its elements, by the existing standard formulae. In this case, one should apply control parameters TRUN_TOL and TBRC_TOL (CTRL TRUN_TOL = 45, TBRC_TOL = 45):
TBRC_TOL permissible deviation angle of the branch pipe axis from 90°
type: REAL
units: degrees
default value: 3°
permissible value range: > 0; < 90°
TRUN_TOL permissible deviation angle of the run pipe elements from 180°
type: REAL
units: degrees
default value: 3°
permissible value range: > 0; < 90°
- 8. How are the unequal tee stresses determined in calculations according to RD? [show]
- In Russian Code RD 10-249, when the relation between the typical size of a branch pipe and a run pipe is less than 0.769231, the stress intensification is not taken into account. It is an omission in the current Code edition. In this case, when setting tees by default, the program only accounts for stresses in respective elements adjusted in the tee node. If the User resets the BRN_RUN parameter, the check procedure of the run pipe typical size changes accordingly. Starting with the 5.24 update, element “standard tee” has been added. By applying it, one can estimate the stresses in unequal tee connections (see Help for parameter TEE_RD and Appendix XIII).
- 9. How should one set a thick-walled forged tee? [show]
- This element can be set as a “standard tee”. One should assign an arbitrary tee name for the respective cross-section (as opposed to the standard names, starting with BRC, WLT, RFT, UFT, EXT, SOL, WOL, FWB) and determine section parameters for run pipe and branch pipe, as well as the weight of the element (see command &TEE). As an alternative, one can use data for forged tees (their names start with “FRG” in the pipe.dbs database).
Expansion joints
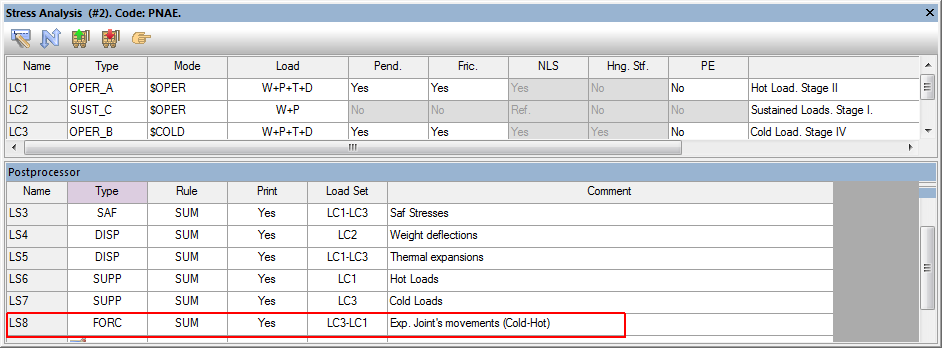
#- 1. How can a summary tables for expansion joints be outputted, to access data on their deformations (axial, shear, angular)? [show]
-
In order to show expansion joint deformation, one should apply post-processing command “FORC” specifying the analysis case or a combination thereof, for which the output is required:
In the file «*.res» a table like this shall appear:
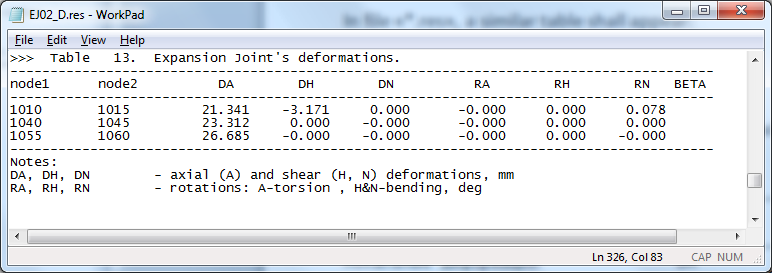
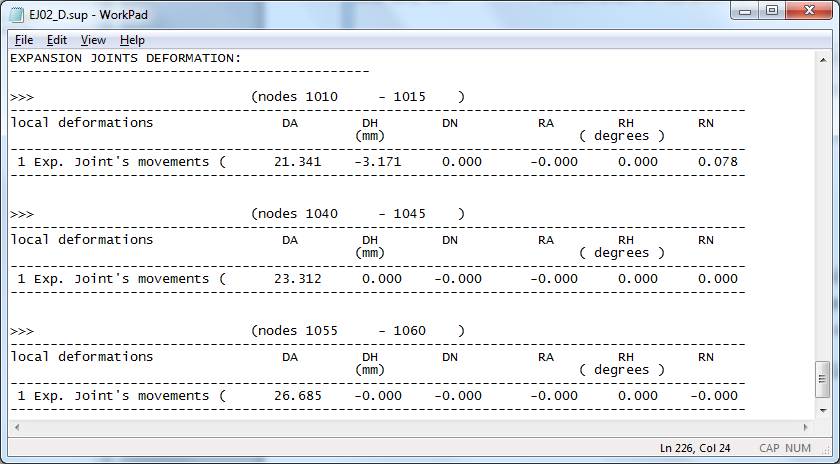
Meanwhile, file «*.SUP» shall contain summary tables for each expansion joint:
- 2. How to model an expansion joints in dPIPE [show]
-
As a rule, a basic bellow expansion joint (without tie rods) works in expansion/compression, shear, bending and torsion. However, in each individual case the bellow expansion joint performance depends on piping layout, anchor and guide placement, that is ultimately it depends on the designing engineer.
In order to model a bellow expansion joint, use command EA (Axial expansion joint):
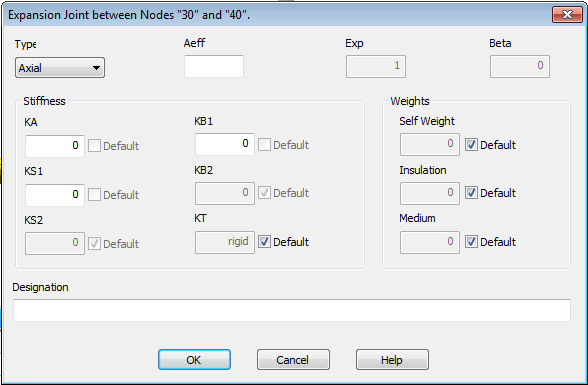
The following expansion joint parameters are set in the input data:
PA - effective area of the expansion joint (an obligatory parameter, since such an expansion joint does not “sustain” pressure thrust force!)
KA - axial spring rate
KS - shear spring rate
KB - angular spring rate
KT - torsional spring rate (is by default equal to the stiffness of the matching pipe)
In case the catalogue does not provide values for shear and angular spring rate, these values can be estimated according to the EJMA formulae (Standard of the Expansion Joint Manufacturers Association, EJMA):
KB=KA*d^2/8; KS=1.5*KA*(d/L)^2
where:
d - effective diameter (~equal to the average corrugation segment diameter, whereby the expansion joint effective area equals ~ pi*d^2/4);
L - bellows length (the length of the bellows, not to be confused with the installed length of the whole expansion joint including nozzles, flanges, etc.)
- 3. How does one specify the expansion joint length in the calculation model? [show]
- The expansion joint length is specified according to the catalogue as the distance between two flanges.
- 4. How is the expansion joint performing capacity checked judging by the analysis results? [show]
-
Upon completing analysis for each of the operating modes, spreadsheet “Expansion joint deformation” displays deformations in the local coordinate system:
DA - axial deformation (relative to local axis A);
DH - shear deformation (relative to local axis H);
DN - shear deformation (relative to local axis N);
RA - torsional deformation (relative to local axis A);
RH - angular deformation (relative to local axis H);
RN - angular deformation (relative to local axis N);
Full values for shear and angular deformations are determined by the following formulae:
DS = SQRT(DH^2+DN^2)
RB = SQRT(RH^2+RN^2)
Estimation of the expansion joint performance capacity is usually carried out by comparing its deformation amplitude and range to the allowable values given in the catalogue. Since the strain range value is limited by low cycle fatigue strength, the allowable values are specified for a certain number of loading cycles (generally for 1000-2000 cycles).
If the piping system is subjected to one operating mode, the check amounts to the following steps (details may vary for different catalogues):
1. Deformation amplitudes (DA, DS and RB) both in cold and hot states are compared to allowable values.
2. Strain ranges between hot and cold states are determined as follows:
DA = DA(hot)- DA(cold)
DS = SQRT( (DH(hot)-DH(cold))^2 + (DN(hot)-DN(cold))^2 )
RB = SQRT( (RH(hot)-RH(cold))^2 + (RN(hot)-RN(cold))^2 )
3. The expansion joint performance capacity is checked under the concurrent impact of tension, shear and bending (“Rated Movement”):
DA/[DA] + DS/[DS] + RB/[RB] <= 1
Here, [DA], [DS] и [RB] are the allowable strain ranges for tension/compression, shear and bending from the catalogue.
Strain ranges should not be compared to the allowable values separately, since such values are given for a case, when there are no other deformations present (e.g. [DA]=50 mm implies the strain range for tension/compression of 50 mm is acceptable given there are no shear or angular deformations),
If the catalogue lacks allowable values for shear and angular deformation, such values can be calculated according to the EJMA formulae:
[DS] = L*[DA]/(3*d)
[RB] = 2*[DA]/d
4. If the number of loading cycles does not correspond to the number of cycles, for which the allowable strain ranges had been calculated, then such strain ranges (or allowable values thereof) should be adjusted at a needed number of cycles using adjustment coefficients or diagrams, which can be generally found in the catalogues.
5. It should also be taken into consideration that bellows expansion joints are not meant to take torsional moment. It can cause instability even at relatively low values. Therefore, it is recommended to confirm acceptability of the estimated torsional moment with the expansion joint manufacturer.
- 5. Should the pressure thrust force in bellows being taken into account for calculating the spring hangers design load? [show]
-
When defining spring hangers design loads that balance piping weight (calculation TYPE='DSGN'), the program does not account for the pressure thrust force by default due to the following reasons:
- the pressure thrust force should be taken by a main anchor, and if there are no anchors in the span where axial expansion joint is installed, then we may expect bursting of the bellows itself due to this load…
- if a spring hangers are used to unload a fixed anchor/nozzle in the hot state, then the load will exist in the cold state (when there is no pressure).
On the contrary, at stage 1 (calculation TYPE='SUST_C'), the pressure thrust force is taken into account. When placing expansion joints, it is strongly recommended to conform to the standard placement schemes by EJMA. If there are no guides or the torsional moment is significant, axial expansion joints without tie rods can lose their stability (which is not checked by the software!)
Piping supports
#- 1. A sliding support: which option should be selected “+/-“ or “-“? [show]
-
As a rule, sliding supports are one-way supports, which means they take the piping weight, limiting its movement downwards. However, they do not limit piping movement upwards. In this case, the support type is by default “-”, as the program suggests:
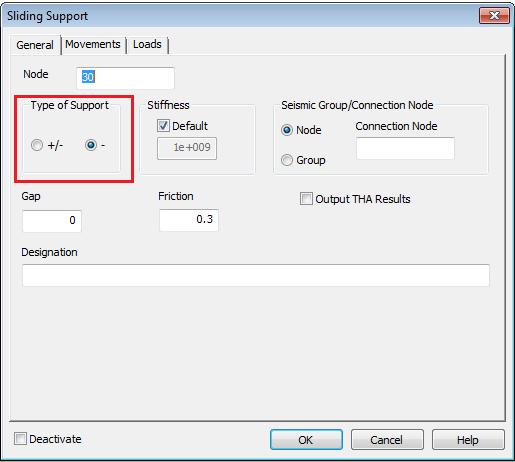
Support type “+/-” should be used for modeling restraints, when the piping can freely slide horizontally, but its vertical deflections are limited. One should take notice that if a one-way support is lifted, the program will display a warning, and lifted supports will blink, when one views the analysis results in PIPE3DV. Moreover, if the lift value for hot state (stage 2) exceeds the value of the LIFT parameter (this one-way weight-bearing support lift criterion is by default set at 2 mm), such a support will be excluded from stage 1, while weight and pressure stresses will be estimated as if this support is absent.
- 2. Do analysis results reflect the support reaction or the piping action on support? Can a horizontal load have a negative sign? [show]
- The analysis results show the loads from piping on support. In case of static loads, such loads can be positive, as well as negative (horizontal load is no exception). In case of applying the response spectrum method in frame of seismic analysis, the sign is ignored.
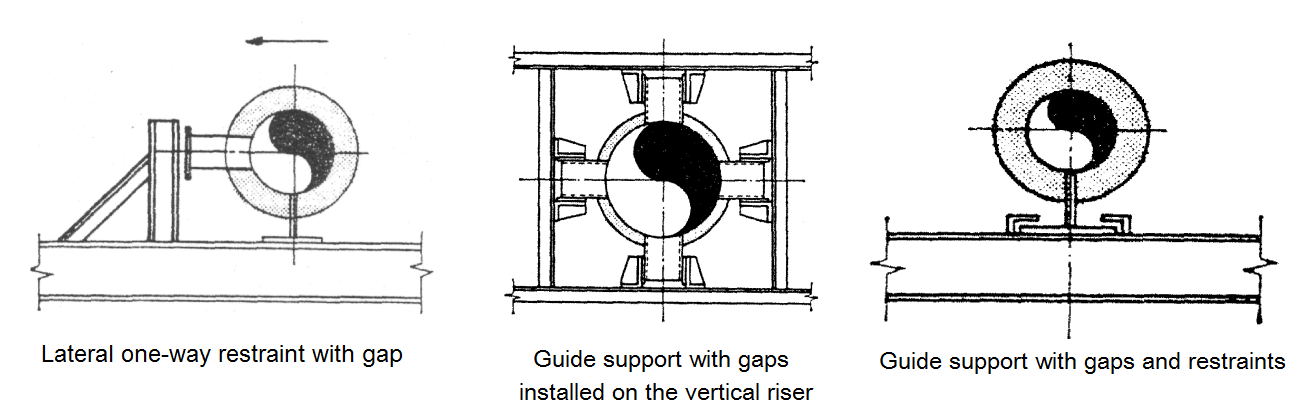
- 3. What is a support gap clearance? In which cases should one set a support gap clearance? [show]
-
A support gap clearance determines the distance piping can freely move till it “meets” a support construction. It should be noticed that the gap clearance is measured from the position of a weightless piping (as depicted in the drawing). Examples of gap supports can be found below:
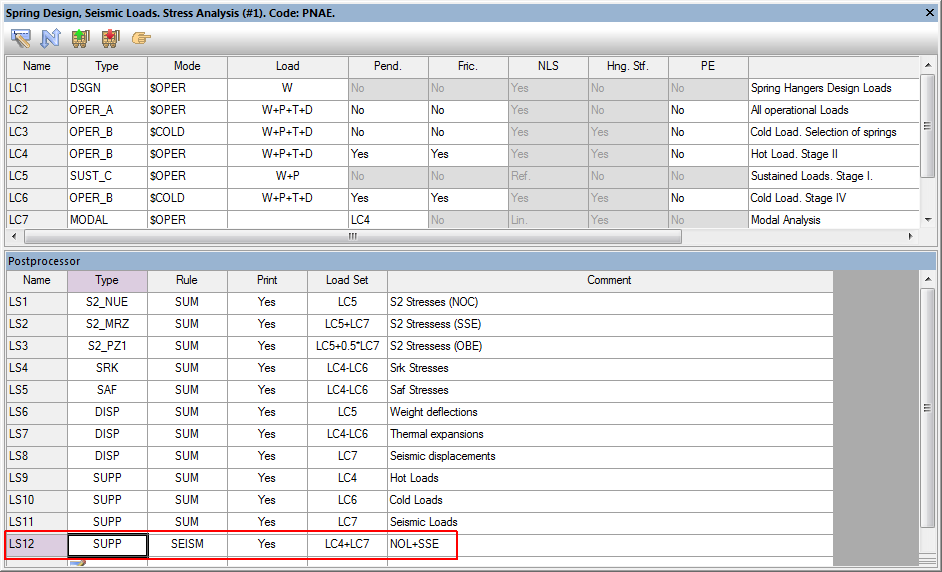
- 4. Why in the calculation results for springs there is an exclamation mark in printout, and the hangers are blinking during PIPE3DV browsing, although there is neither no exceedance of loads, or spring’s variability? [show]
-
In the specification for the postprocessor there is request for the support’s reaction output for load combination NOL+SSE:
at the same time in the Options on the tab "Reports – Supports" load case LC4 is specified as Operating Load for hangers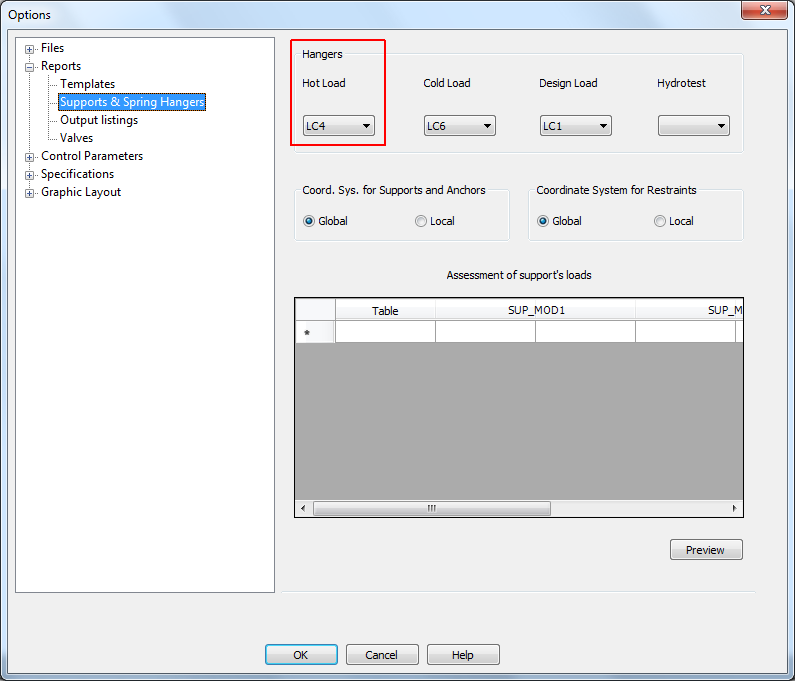
In this case, dPIPE not only checks the resultant total load on the support (it should not exceed the permitted limits), but also analyzes the condition that the operating load is not less than the seismic load: Otherwise, during the seismic event, the spring can be completely unloaded, and no longer be functioned as an elastic support, but rather as support with gaps that will result in impulse shock loads. That is the reason to pay attention of pipe stress engineer:
Otherwise, during the seismic event, the spring can be completely unloaded, and no longer be functioned as an elastic support, but rather as support with gaps that will result in impulse shock loads. That is the reason to pay attention of pipe stress engineer:
РNOL = 1508 N < PSSE = 1528 N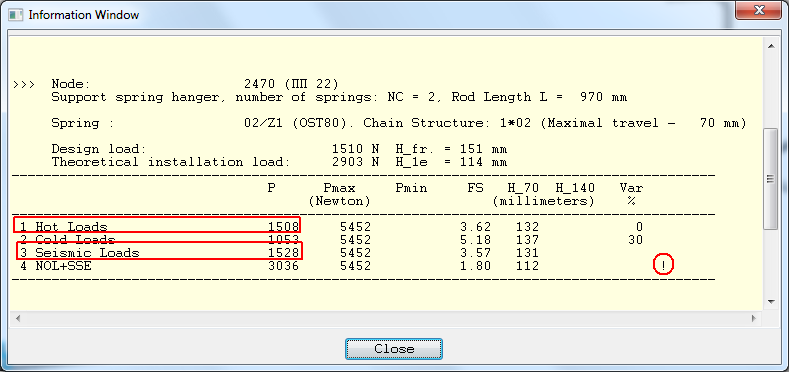
Fatigue strength
#- 1. How stress analysis is realized in dPIPE? [show]
-
Fatigue strength (PNAE Code): How does dPIPE calculate stresses (σaF)K?
1. The following steps are undertaken in dPIPE in order to calculate stresses of (σaF)K category:
a. calculation of internal forces for hot and cold states using elasticity moduli corresponding to the temperatures of those states (Eр and Eх): Fр(Eр) and Fх(Eх);
b. scaling both sets of forces to the reference (cold) elasticity modulus (Eref): Fр1 = Fр(Eр)*(Eref/ Eр) and Fх1 = Fх(Eх)*(Eref/ Eх);
c. calculation of the range of internal forces: F = Fр1 – Fх1;
d. calculation of (σaF)K stresses as function of the internal forces amplitude calculated in the previous step:
(σaF)K = f(F/2)
Since internal forces were calculated in elastic domain, then deformations corresponding to these calculated stresses are:
εref = (σaF)K/Eref
2. Fatigue curves given in Section 5.6 of PNAE G-7-002-86 have been developed on the basis of the test results for polished samples at a room temperature. Tests were processed in terms of diagrams “number of cycles - deformation”. Then, for the sake of convenience, these results had been transformed into “number of cycles - conventional elastic stresses” and scaled to elasticity modulus ET (EM parameter in the FAT command):
[σaF] = ε*EM
Thus, when comparing calculated stresses of category (σaF)K with allowable ones [σaF], it is necessary to return to the terms of “deformations” and to the temperature, for which the curves had been specified. In our case, it means stresses (σaF)K, calculated in step 1.d, should be scaled to the modulus EM:
(σaF)1 = (σaF)K*(EM/EREF)
Namely these stresses are shown in results and compared to the allowed values.
3. Of course, it is possible to scale the stresses to the necessary modulus right away, using this formula:
(σaF)K = σ(EM/EP),
However, we follow a two-step procedure:
(σaF)K = σ(EREF/EP)*(EM/EREF) The reason for that is that we wanted to keep compliance to the RAMPA software (where ranges and amplitudes at stage III are calculated using “cold” modulus). Besides, in all the codes with the exception of PNAE fatigue curves are built using “cold” modulus.
Seismic and dynamic loads calculations
#- 1. During analysis the program displays: “Warning: minimum frequency>Fmax”. What does it mean? [show]
- The message "Warning: minimum frequency>Fmax" means the first natural frequency of the piping system is higher than the values specified by the FMAX parameter (“cutoff frequency”, which is defined in the dialogue window for dynamic control parameters). That is, if you applied the default FMAX value of 33 Hz, it means you have a relatively stiff piping, and its first natural frequency is higher than 33 Hz.
- 2. How is the characteristic (vertical/horizontal) frequency chosen for an elastic model of a viscous damper? [show]
-
Setting dampers in their implicit form means creating a model without specifying the types of dampers given in the database. For such models, depending on their type, either stiffness/damping parameters or Maxwell coefficients are set directly by the user.
When using models of the database dampers, the coefficients for “Maxwell” model are set by the program automatically. While, when using elastic or “viscous” model, damper parameters are calculated by the program based on the “characteristic” frequency (dynamic stiffness of a viscoelastic damper is frequency-dependent). Under the “characteristic frequency” we understand such natural frequency and respective piping vibration mode, which causes the maximal system response in the damper reaction. It is necessary to consider that utilizing an elastic or viscous model yields only an approximate solution. The most acceptable results are provided by the Maxwell damper model, which accounts both for the elastic and viscous aspects of the general dynamic stiffness of this device. Apart from that, one should not forget that it is only possible to apply viscous or Maxwell damper model within time history analysis, when integrating equations of piping motion in time.
- 3. Does dPIPE provide an option for assessing fatigue induced by piping vibration? [show]
-
PNAE Code (chapter 5.12 “Analysis for Vibration Loads”) requires:
— “… determine the system’s natural frequencies and check if they are detuned from the frequencies of the excitation…”. Obviously, dPIPE allows such kind of analysis. However, it has not too much sense for an actual piping, because the real system has quite dense spectrum of natural frequencies around target frequency of excitation. If one tries to suppress those natural frequencies, other ones will shift towards the hazardous zone;
— “check the absence of shock-vibration interactions”;
— “perform cyclic strength calculation with the account of vibration stresses”.
When performing such an analysis, the main issue is to determine the source and mechanism of vibration excitation. Let’s take a look at the most frequent and obvious case – a pump. If the pump has its own vibration isolation, it can mechanically transmit its vibration to the pipe. However, more often a pump is rigidly attached to the pedestal. In this case, the piping vibration is the result of the pressure pulsation in the medium. Pressure pulsation causes force interaction with the piping in bends, locations with hydraulic resistance and tees. At the design stage, it is extremely difficult to estimate the value of pressure pulsation, which the pump will be generating, even more so – the amplitudes of disturbing forces affecting the piping. As a matter of practice, there were cases, when two similar systems had a wildly different vibration level, which could not be substantiated theoretically. To sum it up, apart from some well-known phenomena, generally it is impossible to predict the level of piping vibration at the design stage. A more pragmatic approach is to minimize the existing vibration.
Specification for analysis; typical errors raised during solution
#- 1. During analysis, the following error appears: «Error: nonlinearities not converged» [show]
-
1. During analysis, the following error appears: «Error: nonlinearities not converged»:
How can this be overcome?
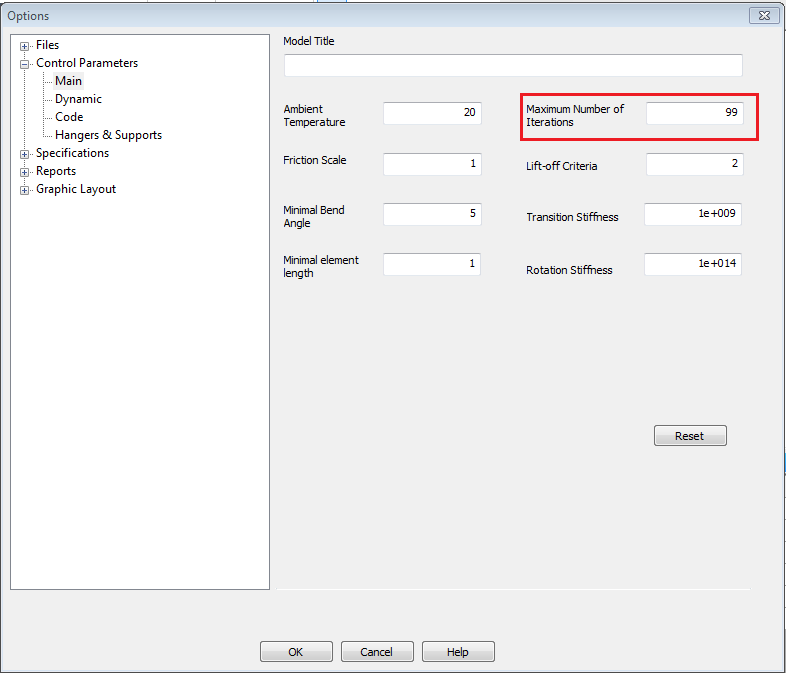
This message appears when convergence could not be reached when solving a non-linear static system (friction + one-way supports). Such issues are rare, but can exist in light and flexible systems (for instance, small diameter pipes). Sometimes the issue can be resolved simply by increasing the maximal number of iterations when performing non-linear analysis (parameter NL_MAXIT, command CTRL):
- 2. During analysis, the following error appears: «non-positive definite matrix» [show]
-
2. During analysis, the following error appears: «non-positive definite matrix»:
What does it mean, and how it can be overcome?
The aforesaid message is displayed, when during analysis it turns out that the stiffness matrix is not positively determined (that is, one of the diagonal matrix elements equals zero or a negative value). It is often the case when some part of the model functions as a “mechanism” – nothing restrains displacement or rotation of the pipe run. Unfortunately, there is nothing to be done, apart from a thorough check of the model.
- 3. What is the difference between «OPER_A» and «OPER_B» analysis types? [show]
-
Both of these analyses calculate “full” load in one of the piping operation modes. The difference lies in the procedures of accounting for spring supports/hangers.
OPER_A: It is presumed the design load for springs in the hot state (Pd) is known. In order to define the piping strain-stress state, an equation of the following form is solved: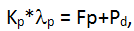 (1)
(1)
where:
Kр is the piping stiffness matrix in the hot state without accounting for spring rate; is the piping deformation under the impact of a full load spectrum for the given mode; Fр (weight + pressure + thermal expansion loads + displacement of piping attachment points).
is the piping deformation under the impact of a full load spectrum for the given mode; Fр (weight + pressure + thermal expansion loads + displacement of piping attachment points).
Upon solving equation (1), it is possible to calculate the so-called “theoretical springing load” or installation load R0, which serves as a basis for further recalculation of reactions in spring supports for different operation modes: (2)
(2)
where ks is the spring rate.
OPER_B: As well as the OPER_A analysis, it is an analysis for an i-mode for all applied loads. As opposed to the previous type, in order to perform this analysis, one should know R0 value (therefore, the software requires compliance with a “strict” rule: «OPER_B» analysis should be performed only after OPER_A analysis): (3)
(3)
In this case spring rate k_s is accounted for in the general stiffness matrix, and R0 value is in the right part of the equation. Upon solving equation (3), reaction in spring hangers/supports can be calculated using the following formula: (4)
(4)