



Компенсаторы в Dpipe
-
Tatiana
- Сообщения: 12
- Зарегистрирован: 22 ноя 2016, 10:45
Re: Компенсаторы в Dpipe
Здравствуйте! Скажите пожалуйста при моделировании шарнирного компенсатора, не очень понятно как задавать угол ветта, если компенсатор стоит в доль оси у, то ветта =0, а вдоль оси х ветта будет 90 ? ось z ?
-
Алексей Берковский

- разработчики

- Сообщения: 124
- Зарегистрирован: 03 мар 2009, 16:03
Re: Компенсаторы в Dpipe
Если для моделирования компенсатора на стяжках используетcя компенсатор типа “Tied”:Ольга писал(а):Здравствуйте, подскажите пожалуйста может ли сдвиговая жесткость в компенсаторе на стяжках стоящем между насосом и неподвижной опорой влиять на вертикальное усилие на патрубок насоса. Увеличив сдвиговую жесткость значительно увеличивается нагрузка на патрубок.
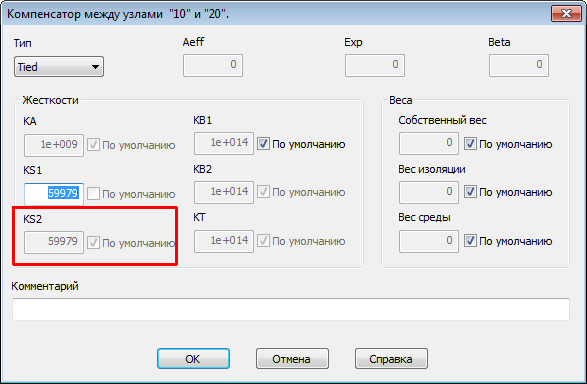
то задаваемая жесткость на сдвиг по умолчанию принимается для 2х взаимно перпендикулярных направлений. Поэтому, если компенсатор расположен горизонтально, то его сдвиговая жесткость будет работать и на вертикаль.
-
Ольга
- Сообщения: 3
- Зарегистрирован: 01 дек 2009, 09:23
Re: Компенсаторы в Dpipe
Здравствуйте, подскажите пожалуйста может ли сдвиговая жесткость в компенсаторе на стяжках стоящем между насосом и неподвижной опорой влиять на вертикальное усилие на патрубок насоса. Увеличив сдвиговую жесткость значительно увеличивается нагрузка на патрубок.
-
Олег Киреев

- разработчики
- Сообщения: 10
- Зарегистрирован: 28 ноя 2009, 03:30
Re: dPIPE 5.21
При определении рабочих нагрузок на пружины (расчет TYPE='DSGN') учитывается только вес, но выбранную программой нагрузку всегда можно скорректировать вручную. На 1-м этапе (расчет TYPE='SUST_C') распорные усилия учитываются.Алексей писал(а):Если подходить с формальной точки зрения, распорное усилие в компенсаторе разве не нужно учитывать при определение рабочих нагрузок на пружинные подвески
(как действие несамоуравновешенных нагрузок, этап 1 расчета)?
При определении рабочей нагрузки на пружины мы не учитываем распорные усилия автоматически т.к. не видим в этом никакого смысла:
- если по концам осевого компенсатора не будет неподвижных опор, то в первую очередь "разорвет" сам компенсатор;
- если с помощью пружины пытаться разгрузить неподвижную опору/патрубок в рабочем состоянии, то нагрузка появится в холодном (когда давления нет).
При установке компенсаторов рекомендуем строго придерживаться стандартных схем расстановки по EJMA. При отсутствии направляющих опор или наличия значительного крутящего момента осевые компенсаторы без стяжек могут потерять устойчивость (а это программа не проверяет!)
Для вывода деформаций компенсаторов нужно использовать постпроцессорную командуСуществует ли в программе возможность вывести какую-нибудь сводную таблицу по компенсаторам, где была бы отражена информация по их деформациям
(осевая, сдвиговая, угловая)?
"FORC". Тогда в файле *.res появляются таблички вида:
>>> Таблица 28. Деформации компенсаторов.
----------------------------------------------------------------------------------------
узел1 узел2 DA DH DN RA RH RN BETA
----------------------------------------------------------------------------------------
e790 e800 -9.323 -0.133 -0.162 -0.002 0.503 -0.309
e810 1520a -9.369 -0.133 -0.152 -0.002 -0.566 0.597
----------------------------------------------------------------------------------------
Примечания:
DX, DY, DZ - осевая (A) и сдвиговые (H, N) деформации, мм
RX, RY, RZ - угловые деформации: кручение A, изгиб H, N, град
а в файле *.SUP для каждого компенсатора выводятся сводные таблицы:
ДЕФОРМАЦИИ КОМПЕНСАТОРОВ:
---------------------------------------------
>>> (узлы e790 - e800 )
--------------------------------------------------------------------------------------------
локальные деформации DA DH DN RA RH RN
(мм) ( градусы )
--------------------------------------------------------------------------------------------
1 NOL Internal Forces -9.323 -0.133 -0.162 -0.002 0.503 -0.309
2 RLE Internal Forces 5.620 0.301 0.225 0.004 0.800 1.084
--------------------------------------------------------------------------------------------
-
Алексей
- Сообщения: 20
- Зарегистрирован: 26 янв 2011, 21:36
- Контактная информация:
Re: dPIPE 5.21
Если подходить с формальной точки зрения, распорное усилие в компенсаторе разве не нужно учитывать при определение рабочих нагрузок на пружинные подвески
(как действие несамоуравновешенных нагрузок, этап 1 расчета)?
Существует ли в программе возможность вывести какую-нибудь сводную таблицу по компенсаторам, где была бы отражена информация по их деформациям
(осевая, сдвиговая, угловая)?
(как действие несамоуравновешенных нагрузок, этап 1 расчета)?
Существует ли в программе возможность вывести какую-нибудь сводную таблицу по компенсаторам, где была бы отражена информация по их деформациям
(осевая, сдвиговая, угловая)?
-
Олег Киреев
- разработчики
- Сообщения: 10
- Зарегистрирован: 28 ноя 2009, 03:30
Re: dPIPE 5.21
При грамотном проектировании распорное усилие не должно влиять на нагрузки пружинных подвесок. Осевые компенсаторы обычно устанавливают на прямых участках между неподвижными опорами которые и воспринимают эти распорные усилия.Каким образом в программе учитывается распорное усилие в осевом компенсаторе от давления в рабочих нагрузках на пружинные подвески
и соответсвенно на сам выбор подвесок?
Но формально:
- при определении нагрузок (DESIGN) учитывается только вес;
- распорные усилия будут учитываться при определении вертикальных перемещений подвесок (если в нагрузках присутствует давление)
-
Алексей
- Сообщения: 20
- Зарегистрирован: 26 янв 2011, 21:36
- Контактная информация:
Re: dPIPE 5.21
Каким образом в программе учитывается распорное усилие в осевом компенсаторе от давления в рабочих нагрузках на пружинные подвески
и соответсвенно на сам выбор подвесок?
и соответсвенно на сам выбор подвесок?
-
Олег Киреев
- разработчики
- Сообщения: 10
- Зарегистрирован: 28 ноя 2009, 03:30
Re: Компенсаторы в Dpipe
Простой сильфонный компенсатор (без стяжек) в общем случае будет работать на растяжение/сжатие, сдвиг, поворот и кручение - все зависит от трассировки трубопровода, расстановки неподвижных и направляющих опор (т.е. в конечном итоге от проектировщика).phgogin писал(а):При расчете компенсаторов на сейсмостойкость возникли вопросы:
1. Рассчитываются ли деформации (осевая, угловая, сдвиговая) универсальных компенсаторов в Dpipe 5.2 независимо или они связаны?
Моделировать такой компенсатор в программе лучше всего с помощью команды EA (Осевой компенсатор).
В исходных данных задаются следующие характеристики компенсатора:
PA - эффективная площадь компенсатора (задается обязательно, т.к. такой компенсатор не "держит" распор от давления!)
KA - осевая жесткость
KS - сдвиговая жесткость
KB - угловая жесткость
KT - жесткость на кручение (по умолчанию равна жесткости присоединенной трубы)
Если в каталоге не приводятся значения сдвиговой и угловой жесткости, то их значения можно оценить по формулам из EJMA:
KB = KA*d^2/8
KS = 1.5*KA*(d/L)^2
где
d - эффективный диаметр (~ равен среднему диаметру гофра, при этом эффективная площадь компенсатора ~ pi*d^2/4)
L - длина сильфона (только сильфона, а не монтажная длина компенсатора с учетом патрубков, фланцев и т.п.)
Проверка работоспособности компенсатора.phgogin писал(а):2. Нужно ли руководствоваться только EJMA при оценке работоспособности компенсатора по деформациям?
3. Можно ли говорить о сдвиговых деформациях в универсальном компенсаторе без стяжек при наличии только одного сильфона?
После проведения расчета для каждого режима работы в таблице "Деформация компенсаторов" приводятся деформации компенсатора в локальной системе координат:
DA - осевая деформация (отн. лок. оси A)
DH - сдвиговая деформация (отн. лок. оси H)
DN - сдвиговая деформация (отн. лок. оси N)
RA - деформация кручения (отн. лок. оси A)
RH - угловая деформация (отн. лок. оси H)
RN - угловая деформация (отн. лок. оси N)
Полные значения сдвиговой и угловой деформаций определяются по формулам:
DS = SQRT(DH^2+DN^2)
RB = SQRT(RH^2+RN^2)
Оценка работоспособности компенсатора обычно проводится путем сравнения амплитуды и размаха деформации компенсатора с допускаемыми значениями, приведенными в каталоге. Так как величина размаха лимитируется как правило усталостной прочностью, то допускаемые значения приводятся в каталогах для заданного числа циклов нагружения (обычно для 1000-2000 циклов).
Если трубопровод работает в одном режиме, то проверка обычно сводится к следующим этапам (в разных каталогах детали проверки могут отличаться):
1. Сравниваются с допускаемыми амплитуды деформаций (DA, DS и RB) в холодном и рабочем состоянии.
2. Определяются размахи деформаций между рабочим и холодным состоянием
DA = DA(раб)- DA(хол)
DS = SQRT( (DH(раб)-DH(хол))^2 + (DN(раб)-DN(хол))^2 )
RB = SQRT( (RH(раб)-RH(хол))^2 + (RN(раб)-RN(хол))^2 )
3. Проверяется условие работоспособности компенсатора при совместном действии растяжения, сдвига и поворота:
DA/[DA] + DS/[DS] + RB/[RB] <= 1
Здесь [DA], [DS] и [RB] - допускаемые размахи деформации растяжения/сжатия, сдвига и поворота из каталога.
По отдельности сравнивать размахи с допускаемыми значениями нельзя, так как допускаемые значения приводятся в каталогах для случая, когда других деформаций нет (например, [DA]=50 мм означает, что допускается размах на растяжение/сжатие 50 мм при условии, что сдвиговая и угловая деформация отсутствует).
В случае, если в каталоге не приводятся значения допускаемой сдвиговой и угловой деформации, то их значения можно оценить по формулам из EJMA:
[DS] = L*[DA]/(3*d)
[RB] = 2*[DA]/d
4. Если число циклов нагружения не совпадает с тем значением для которого приведены допускаемые размахи, то размахи деформаций (или их допускаемые значения) корректируются на нужное число циклов с помощью поправочных коэффициентов или графиков, которые обычно приводятся в каталогах.
5. Следует также иметь в виду, что обычно сильфонные компенсаторы не предназначены для восприятия крутящего момента и даже при сравнительно небольших величинах последнего могут потерять устойчивость. Поэтому рекомендуется всегда согласовывать величину полученного из расчета крутящего момента с производителем компенсаторов.
-
phgogin
- Сообщения: 15
- Зарегистрирован: 27 ноя 2009, 15:25
- Контактная информация:
Компенсаторы в Dpipe
При расчете компенсаторов на сейсмостойкость возникли вопросы :
1. Рассчитываются ли деформации (осевая, угловая, сдвиговая) универсальных компенсаторов в Dpipe 5.2 независимо или они связаны?
2. Нужно ли руководствоваться только EJMA при оценке работоспособности компенсатора по деформациям?
3. Можно ли говорить о сдвиговых деформациях в универсальном компенсаторе без стяжек при наличии только одного сильфона?
1. Рассчитываются ли деформации (осевая, угловая, сдвиговая) универсальных компенсаторов в Dpipe 5.2 независимо или они связаны?
2. Нужно ли руководствоваться только EJMA при оценке работоспособности компенсатора по деформациям?
3. Можно ли говорить о сдвиговых деформациях в универсальном компенсаторе без стяжек при наличии только одного сильфона?
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и 0 гостей